Lab 2 Overview
In lab 2, students set up a bluetooth connection between their laptopn and the artemis nano. They then created and executed functions that transmitted data via bluetooth.
Bluetooth Setup
For my computer to communicate with the artemis nano via bluetooth, the nano’s MAC address was printed by running ble_arduino.ino.

The MAC address was then written into a python file that is queried when attempting to connect via bluetooth. Importantly, any single digit number between colons needs to be preceeded by a 0.
Python code was then run to generate a UUID. The ID was input into artemis arduino code and python code on my computer. A unique UUID distinguishes a particlar artemis nano, allowing my computer to connect to the corret board.
Once both the UUID and MAC address were correctly defined, python bluetooth functions were imported and ran to establish bluetooth connection. Python generated outputs as shown.
Demo
Python code was provided to students to verify bluetooth communication with the artemis. The code executed arduino functions on the artemis which then communicated back to my laptop. The first two functions queried the values of the characteristic string and characteristic float.
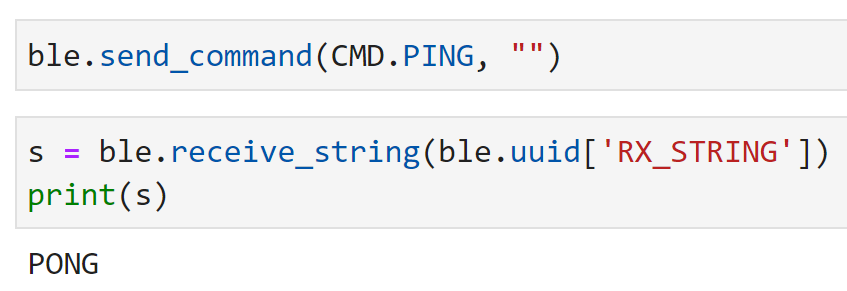
The next function redefined the value of the characteristic string to “PING”. When the value of characteristic string was queired again, python showed that its value had changed. The message send off was confirmed in the Arduino serial monitor.

The last demo function sent two integers to the artemis, which were then printed into the serial monitor.


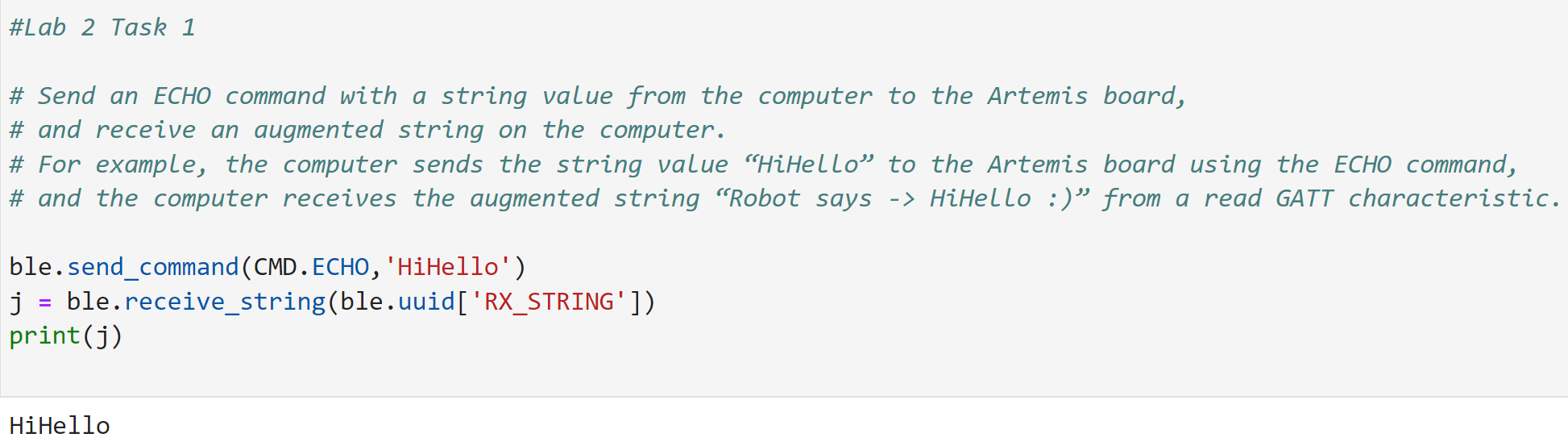
Task 1: ECHO
The first task was to send the artemis a string using the command ECHO. The command sent the exact same string back to my laptop.
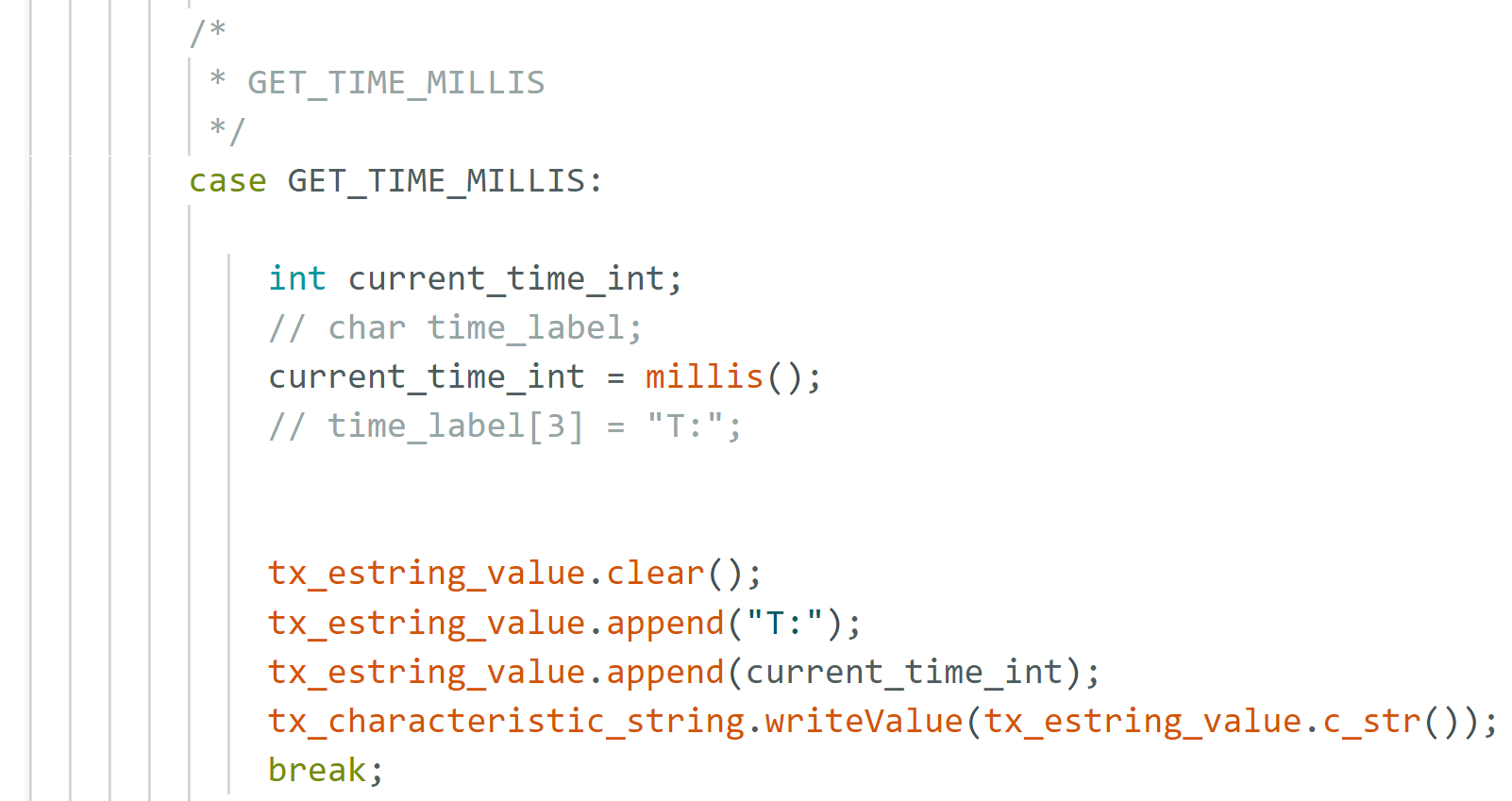
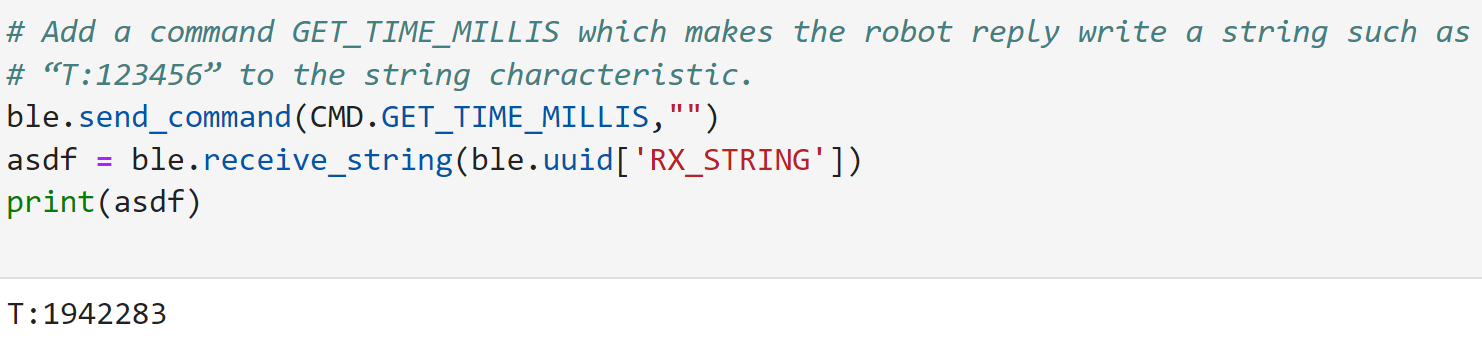
Task 2: GET_TIME_MILLIS
The second task was creating a new function (pictured below) on the arduino which could be called by python on my laptop. The function queried the artemis for the time (in ms) since the current arduino program started running. In the function, the time is converted to a string, and it is then written to the characteristic float using the same syntax as preexisting programs. On my laptop, python returned a string as shown.
Task 3: Notification Handler
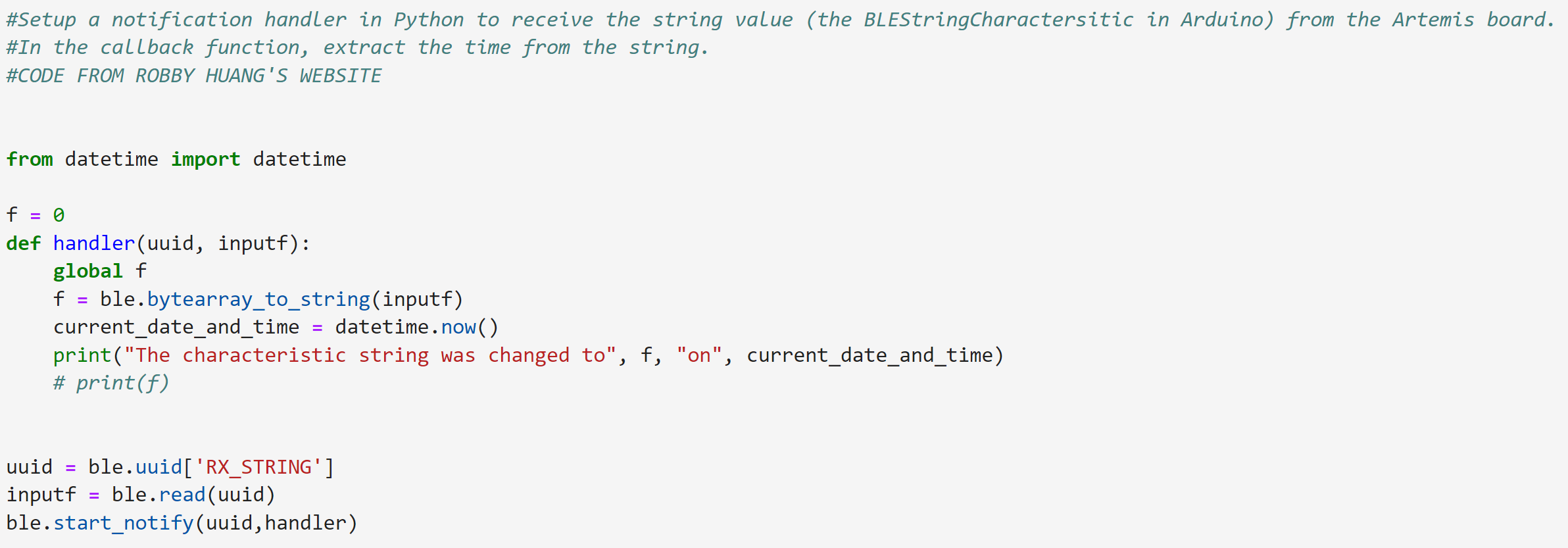
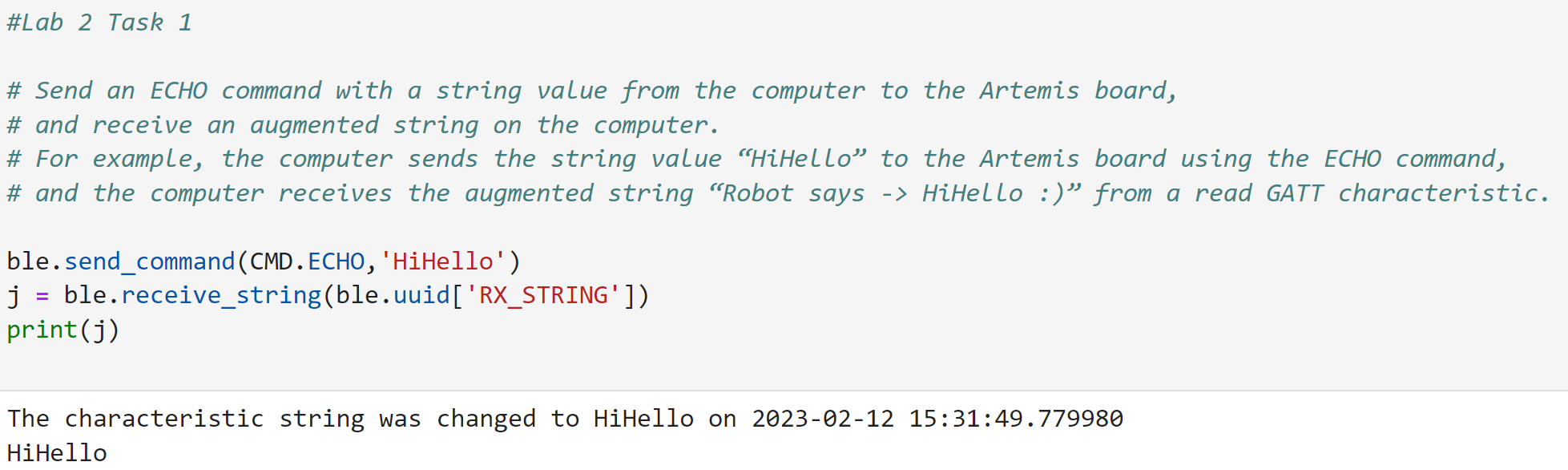
A notification handler is triggered whenever the value of a variable is changed. Task 3 asked students to make a notifiation handler that triggers when the value of the characteristic string is changed. The code that I used to make the notification handler was an augmented version of that used by Robby Huang (website: https://lh479.github.io/ECE4960/). The handler is pictured in the top image below. When running any other code that changes the charactertistic string, python displays as shown in the bottom image below.
Task 4 & 5: Get Temperature
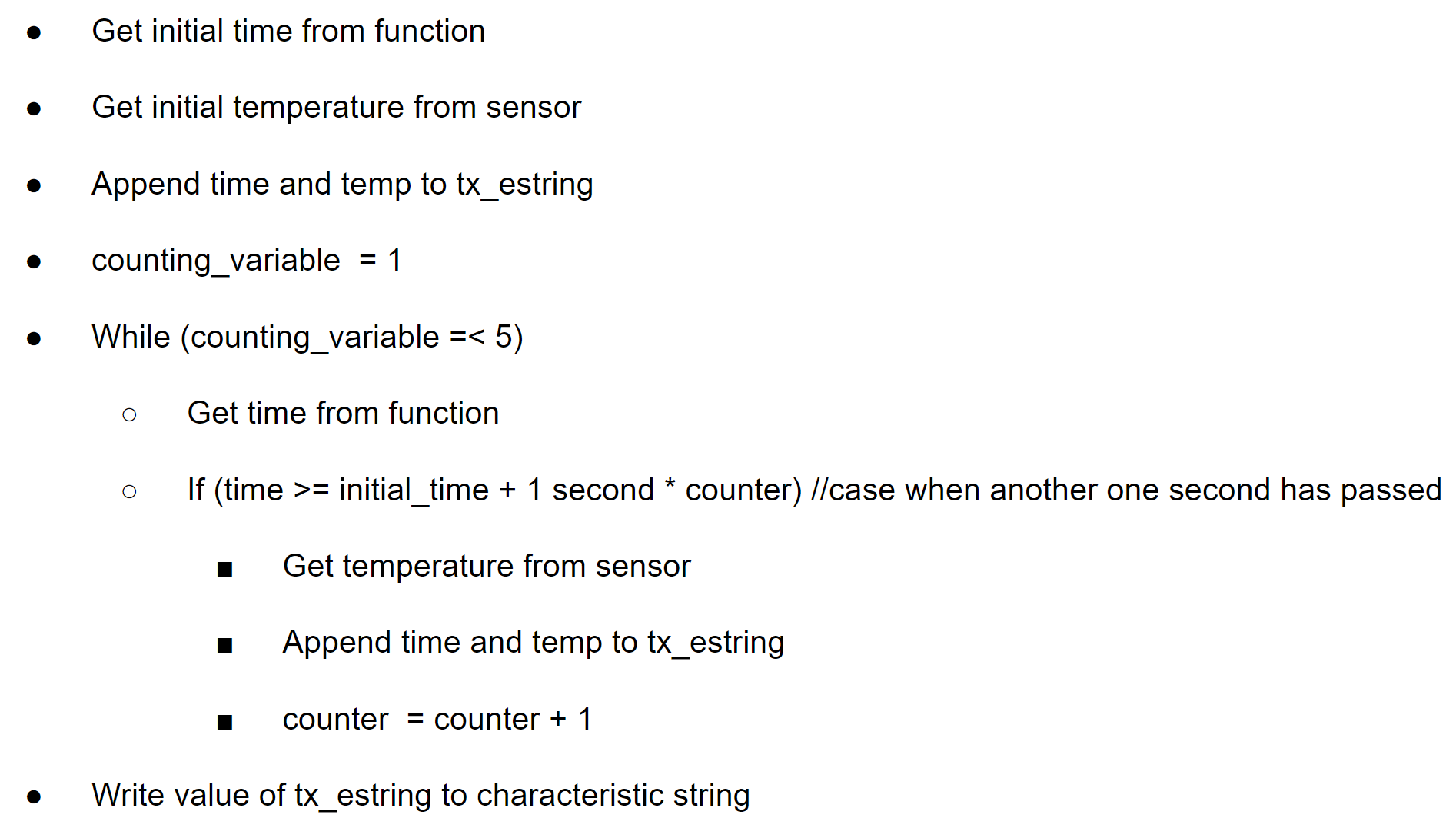
In tasks 4 and 5, students wrote functions to query the temperature over a 5 second interval. The first function needed to take the temperature for every one second that passed, and the second function needed to take as many temperature readings as possible. Psuedo code for the first function is pictured in the top image below. The output of the function as seen from my laptop is pictured in the bottom image below.

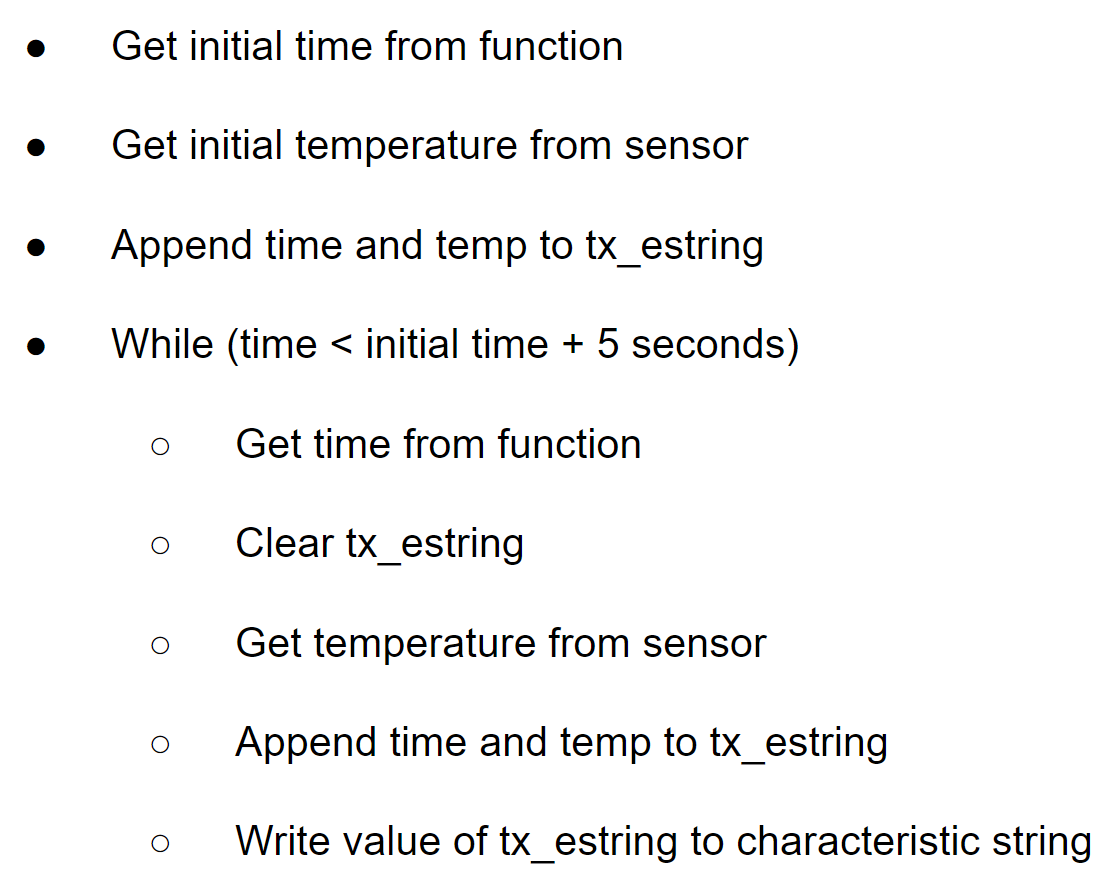
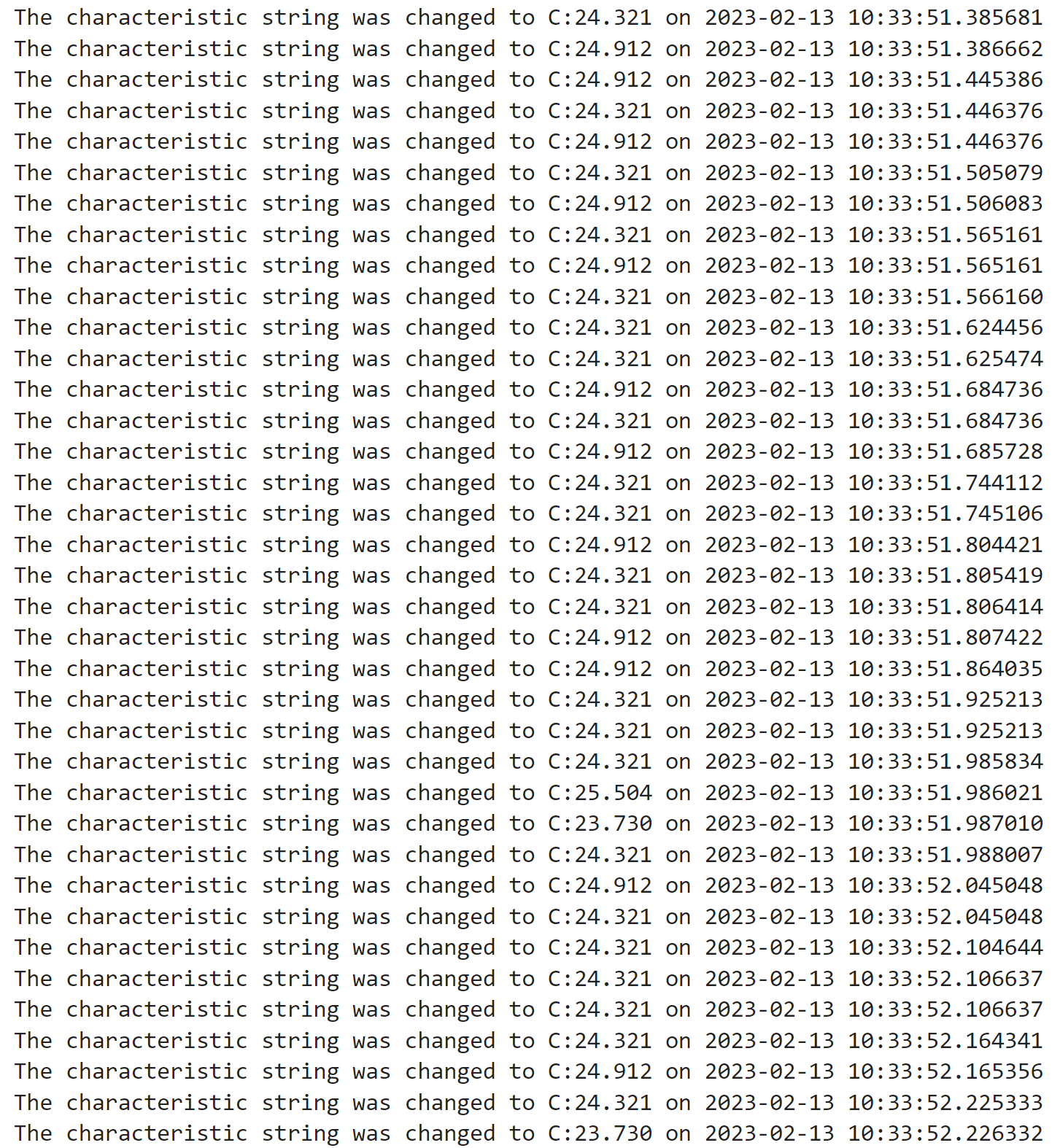
Psuedo code for the second function is pictured below to the left. Importantly, the temperature values could not be returned all at once to my laptop: a single string with all of them would have exceeded the characteristic limit. Accordingly, the characterisitc string was updated for every temperature value taken, and this change was displayed on my laptop due to the notification handler. The output of about 1 second of data is pictured below to the right. In total, 188 temperature values were taken.
Task 6
The artemis has 384 kB or RAM. If the artemis were to take 16-bit data points at 150 Hz for 5s, that would total to 16 * 5 * 150 = 12000 bits = 1500 bytes. Because there are 348000 bytes in the artemis’s RAM, the system could handle 348000/12000 = 256 instances of this 5 second transmission before running out of storage.
Effective Data Rate and Overhead
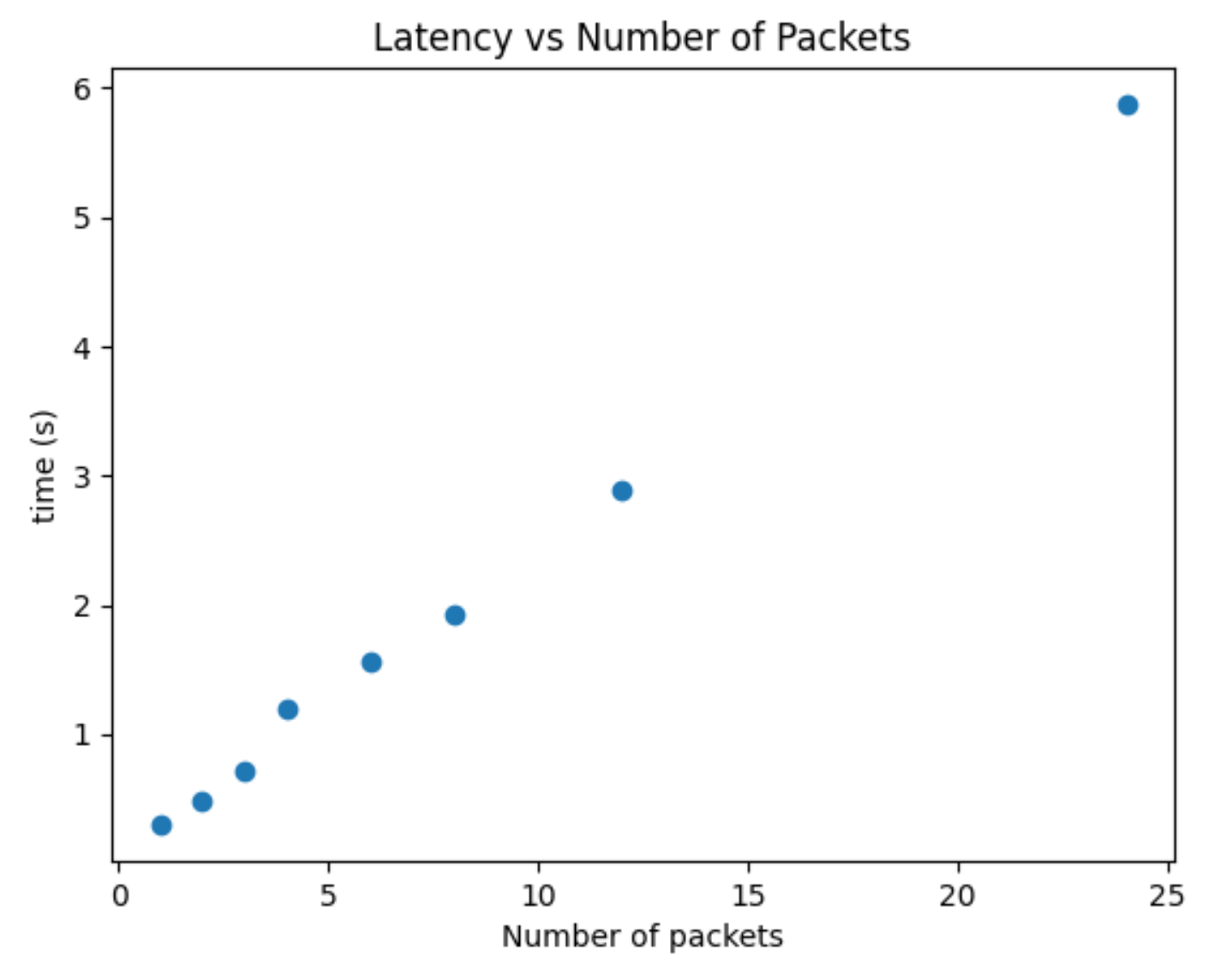
There is a non-negligible amount of time for function calls and data tranmission via bluetooth. To quantify this latency, I used the echo command to send 120 bytes of information using various amounts of packets. The time to send the commands and recieve all the echos is shown in the graph below.
Reliability
To check reliability, I wrote a program to send bluetooth messages for every run through of a while loop. The message was a number that increased by one every loop. It was apparent if any one message was not recieved, as that particular number would have been missing from the python output. The output is shown below with no numbers missing.
![]()